CORSO BRACCIO ROBOT LEZIONE 2
INDICE
- Avvertenze
- Note sul Copyright
- Assemblaggio del Braccio Robotico
- Componenti il Braccio Robotico
- Assemblaggio della Base del Braccio Robotico
- Assemblaggio del Braccio
- Assemblaggio del Gomito del Braccio Robotico
- Assemblaggio del Polso del Braccio Robotico
- Assemblaggio dell’Avanbraccio del Braccio Robotico
- Video assemblaggio commentato del Braccio Robot
- Progetto 03 – Definizione Work Space del Braccio Robot con Arduino
Avvertenze
Relativamente agli aspetti di sicurezza, poiché i progetti sono basati su alimentazione elettrica in bassissima tensione erogata dalla porta usb del pc o da batterie di supporto o alimentatori con al massimo 9V in uscita, non ci sono particolari rischi di natura elettrica. È comunque doveroso precisare che eventuali cortocircuiti causati in fase di esercitazione potrebbero produrre danni al pc, agli arredi ed in casi estremi anche a ustioni, per tale ragione ogni qual volta si assembla un circuito, o si fanno modifiche su di esso, occorrerà farlo in assenza di alimentazione e al termine dell’esercitazione occorrerà provvedere alla disalimentazione del circuito rimuovendo sia il cavo usb di collegamento al pc che eventuali batterie dai preposti vani o connettori di alimentazione esterna. Inoltre, sempre per ragioni di sicurezza, è fortemente consigliato eseguire i progetti su tappeti isolanti e resistenti al calore acquistabili in un qualsiasi negozio di elettronica o anche sui siti web specializzati.
Al termine delle esercitazioni è opportuno lavarsi le mani, in quanto i componenti elettronici potrebbero avere residui di lavorazione che potrebbero arrecare danno se ingeriti o se a contatto con occhi, bocca, pelle, etc. Sebbene i singoli progetti siano stati testati e sicuri, chi decide di seguire quanto riportato nel presente documento, si assume la piena responsabilità di quanto potrebbe accadere nell’esecuzione delle esercitazioni previste nello stesso. Per i ragazzi più giovani e/o alle prime esperienze nel campo dell’Elettronica, si consiglia di eseguire le esercitazioni con l’aiuto ed in presenza di un adulto.
Note sul Copyright
Tutti i marchi riportati appartengono ai legittimi proprietari; marchi di terzi, nomi di prodotti, nomi commerciali, nomi corporativi e società citati possono essere marchi di proprietà dei rispettivi titolari o marchi registrati d’altre società e sono stati utilizzati a puro scopo esplicativo ed a beneficio del possessore, senza alcun fine di violazione dei diritti di Copyright vigenti. Quanto riportato in questo documento è di proprietà di Roberto Francavilla, ad esso sono applicabili le leggi italiane ed europee in materia di diritto d’autore – eventuali testi prelevati da altre fonti sono anch’essi protetti dai Diritti di Autore e di proprietà dei rispettivi Proprietari. Tutte le informazioni ed i contenuti (testi, grafica ed immagini, etc.) riportate sono, al meglio della mia conoscenza, di pubblico dominio. Se, involontariamente, è stato pubblicato materiale soggetto a copyright o in violazione alla legge si prega di comunicarlo tramite email a info@bemaker.org e provvederò tempestivamente a rimuoverlo.
Roberto Francavilla
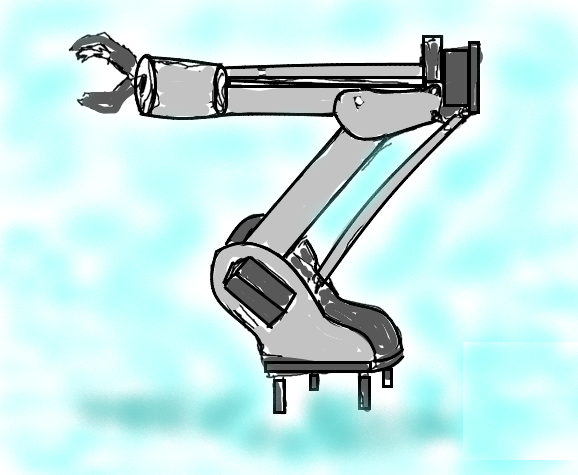
Assemblaggio del Braccio Robotico
Questa lezione la dedichiamo all’assemblaggio del Braccio Robotico. Vi premetto che non è una operazione semplicissima, ma alla fine, quando terminerete, vi sentirete sicuramente molto soddisfatti e fieri…
Poiché ho acquistato un braccio robotico della DOIT, utilizzerò la descrizione e la sequenza di assemblaggio da loro indicata ed aggiungerò, di volta in volta, alcuni commenti, ma soprattutto suggerimenti per cercare di prevenire, il più possibile, errori di assemblaggio che purtroppo a volte emergono solo alla fine quando si inizieranno a dare i primi movimenti al braccio stesso.


Il sito di riferimento della Shenzhen DOIT Doctors of Intelligence & Technology è a questo link
Considerate che la DOIT vende i propri prodotti soprattutto sulle piattaforme di e-commerce tipo Aliexpress.
Componenti il Braccio Robotico
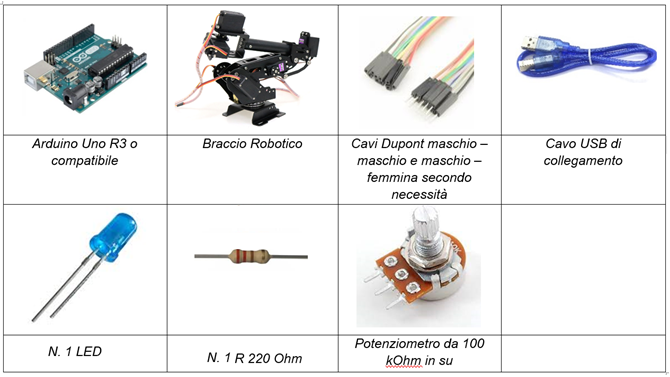
Nella foto sotto ci sono tutte le varie parti che dovremo assemblare:

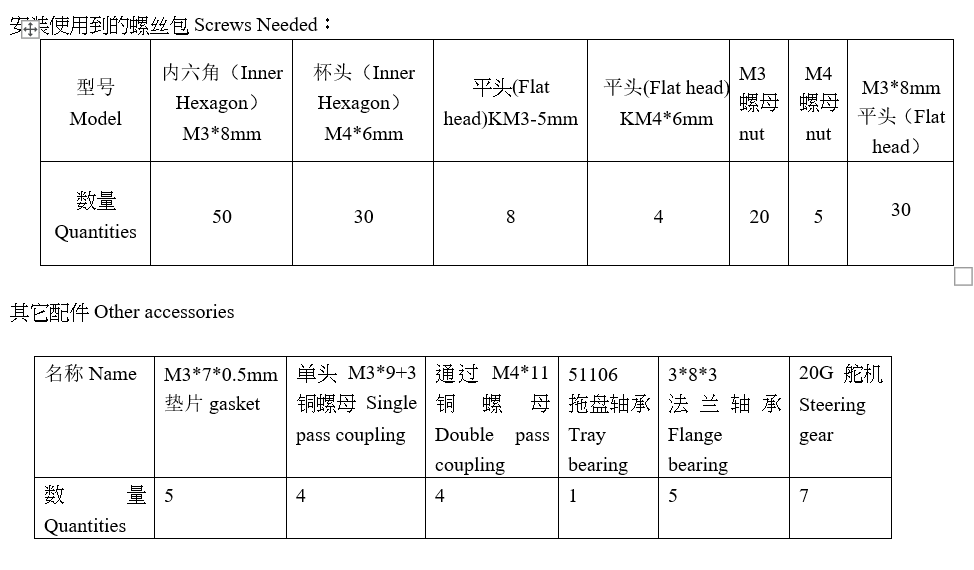
Relativamente ai servomotori, personalmente ho utilizzato gli MG996R, il numero di servomotori dipende dai gradi di libertà che desideriamo creare, poiché ho acquistato anche la pinza (che vedremo successivamente) il numero di servomotori totali è 7.
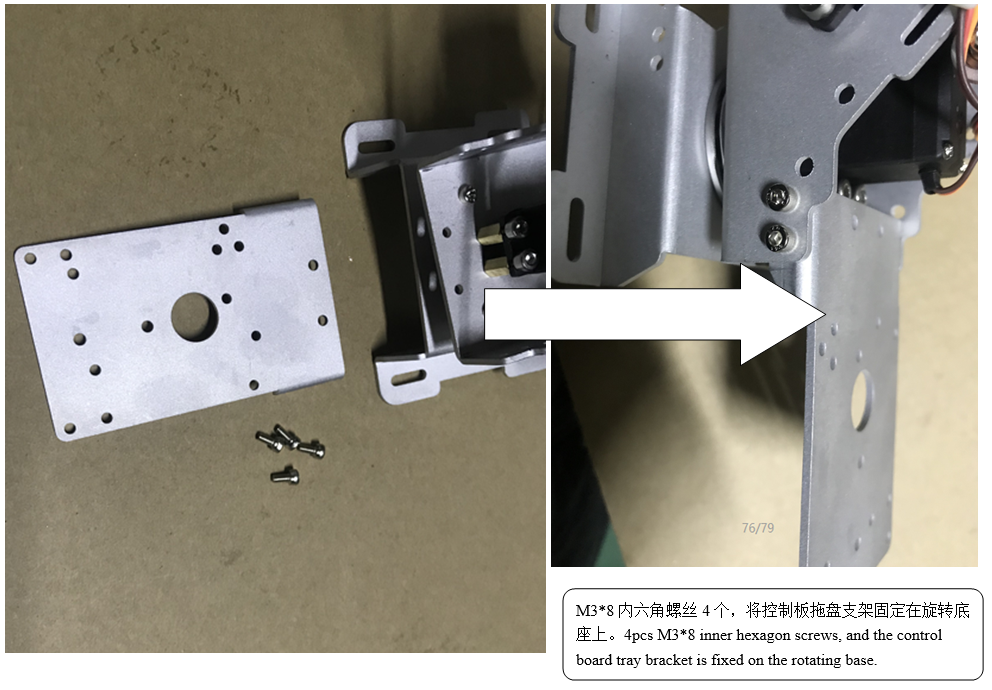
Assemblaggio della Base del Braccio Robotico
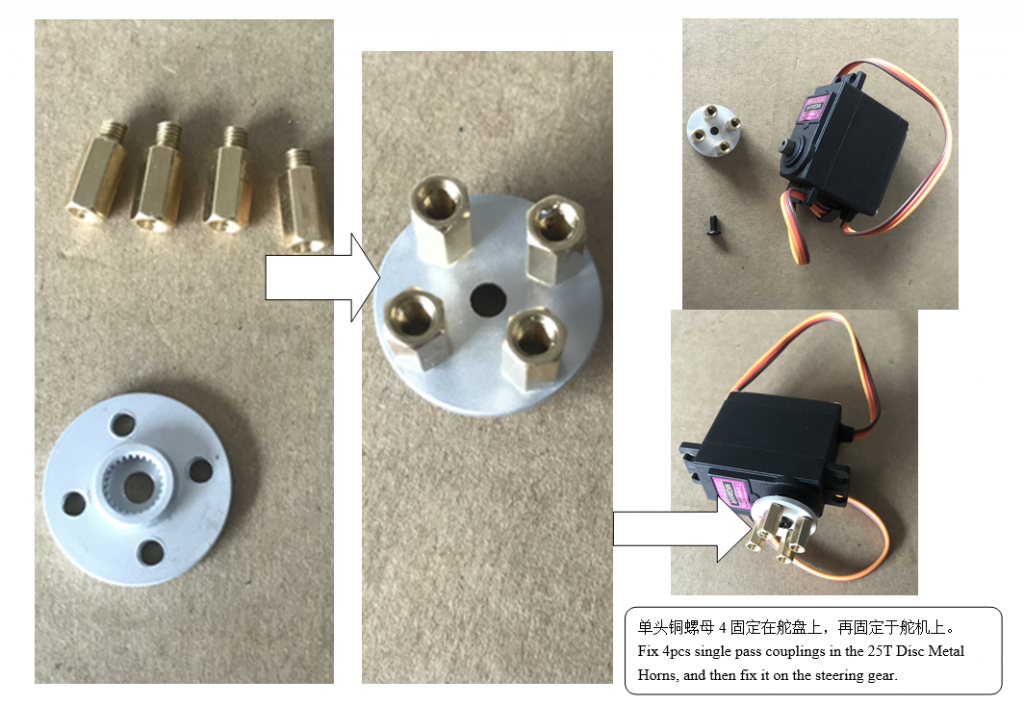
Si parte con l’assemblaggio della base:
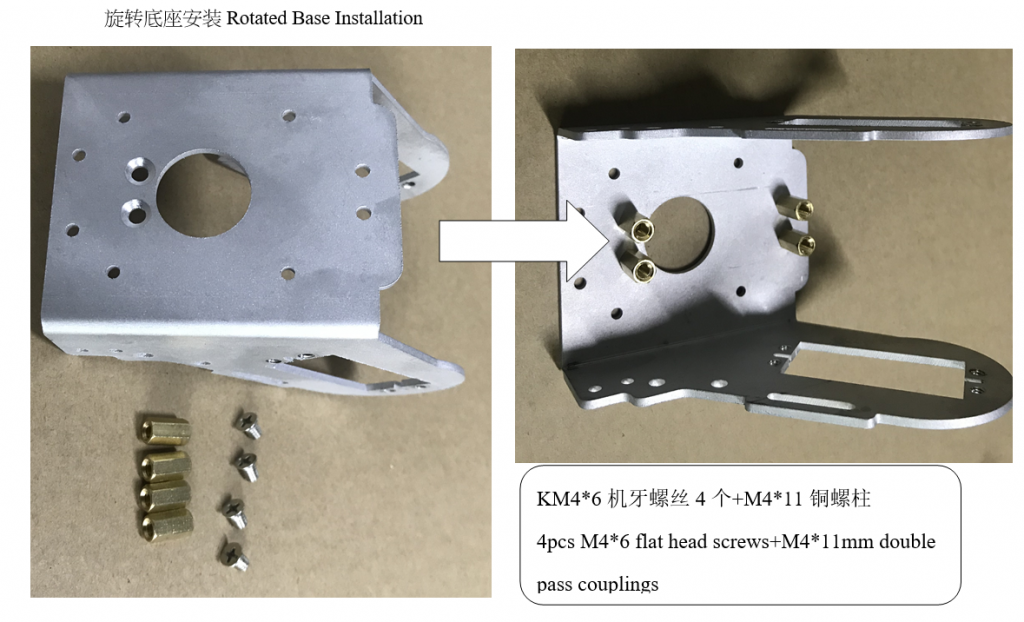
Vengono montati i distanziatori e predisposti i dadi per il bloccaggio del cuscinetto a sfere orizzontale (anche chiamato ralla).

Fate attenzione, il lato piatto dell’esagonale del dado deve essere rivolto verso la base del cuscinetto per tenerlo fermo, in sostanza il cuscinetto si deve incastrare nei quattro dadi e deve restare fisso.
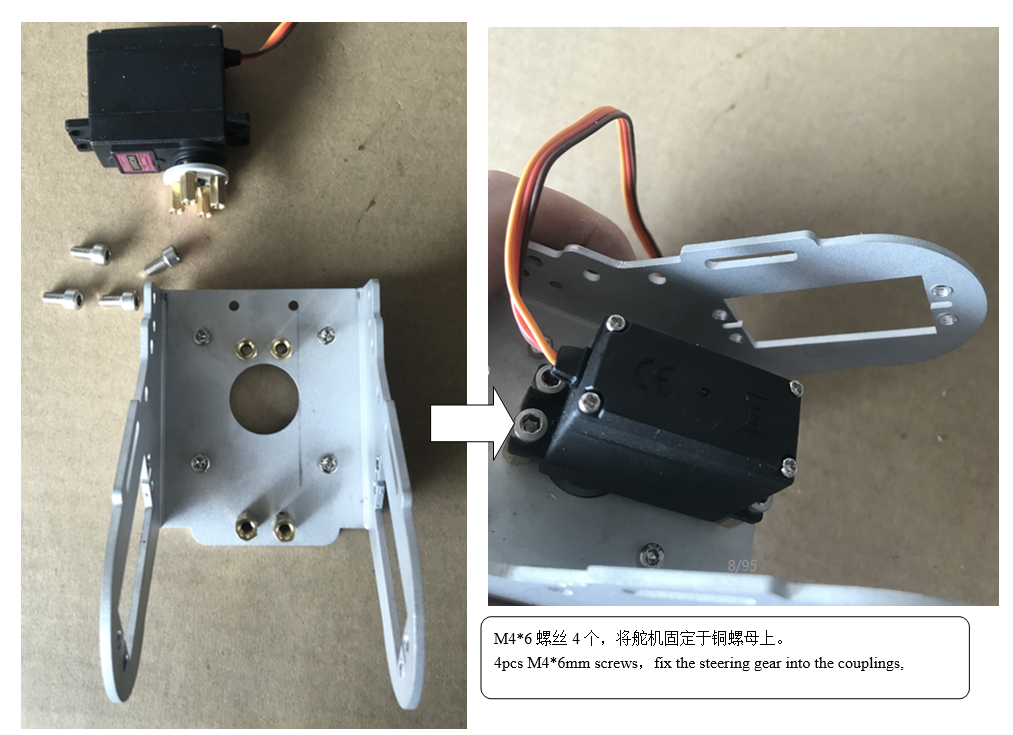
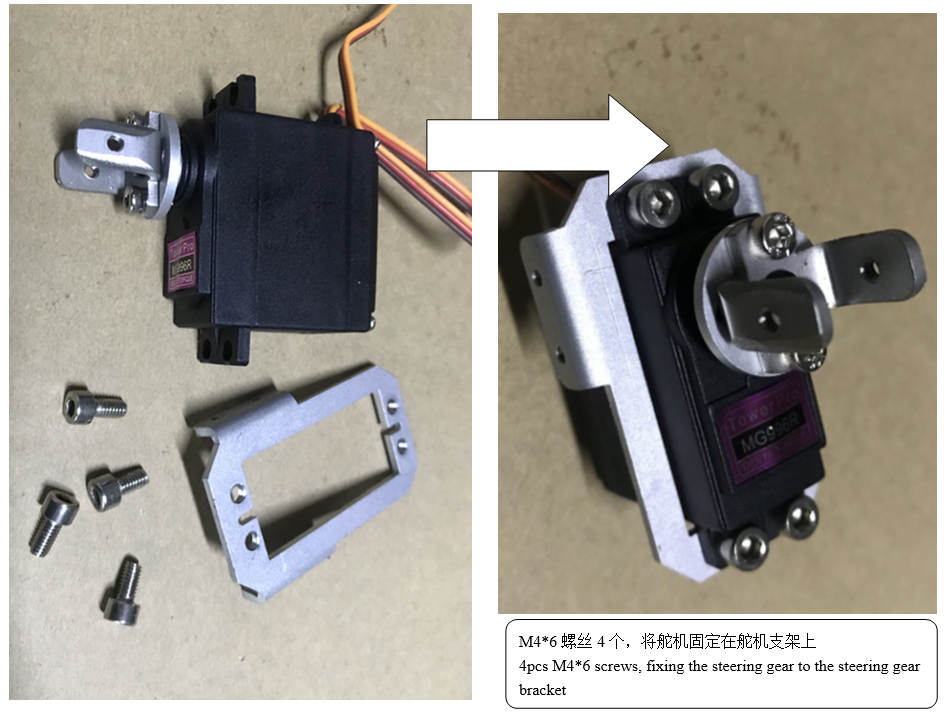
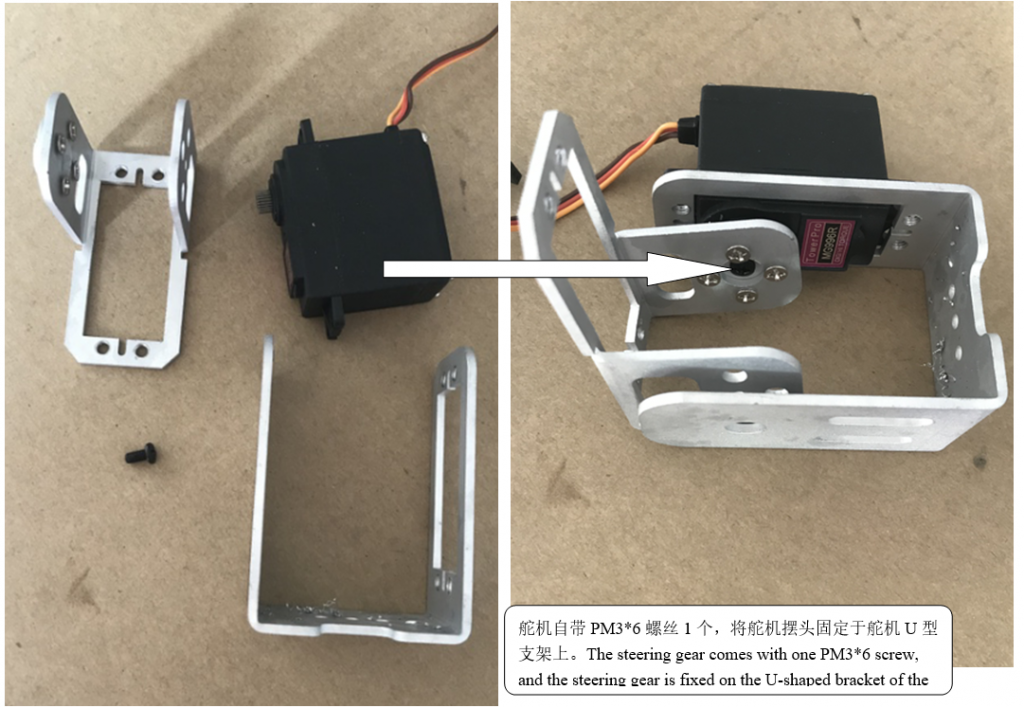
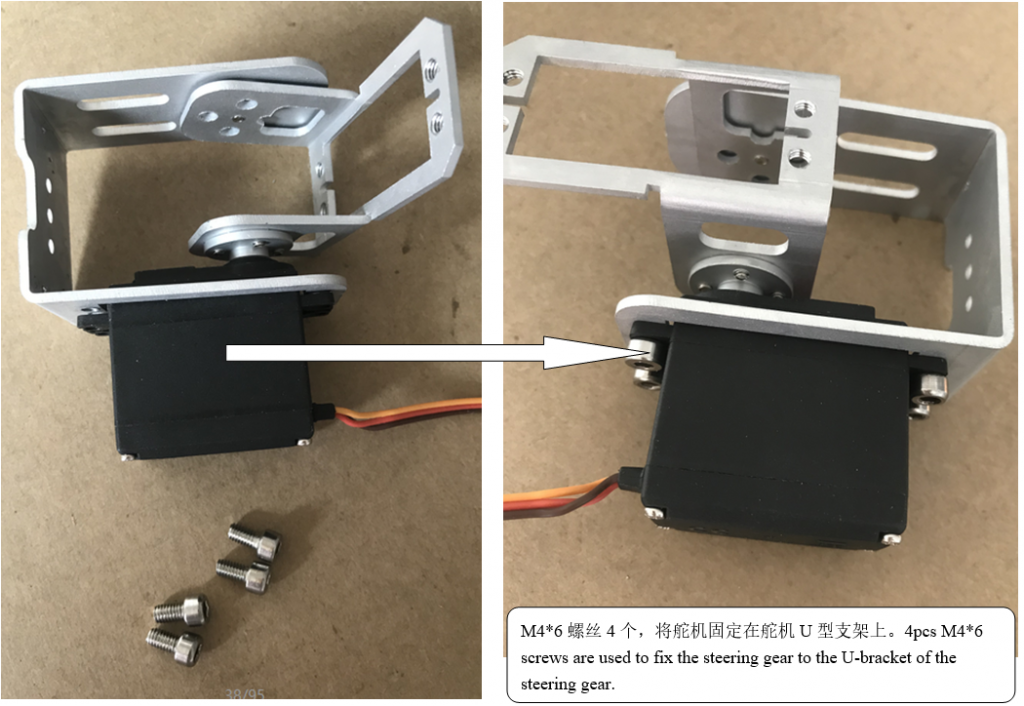
Si passa a fissare il supporto di attacco sul primo servomotore che sarà quello adibito alla rotazione della base.
Questo servomotore deve avere angolo di riposo a 90°, per cui, prima del montaggio, sinceratevi che il rotore sia nella posizione corretta utilizzando quanto appreso nella Lezione 1.
A questo punto si completa l’assemblaggio della base, inserendo le sfere del cuscinetto e fissando in controtelaio il supporto di base, in modo tale che il cuscinetto a sfere sia racchiuso fra le due parti di cui una sarà fissa e l’altra ruoterà grazie all’azione del servomotore.
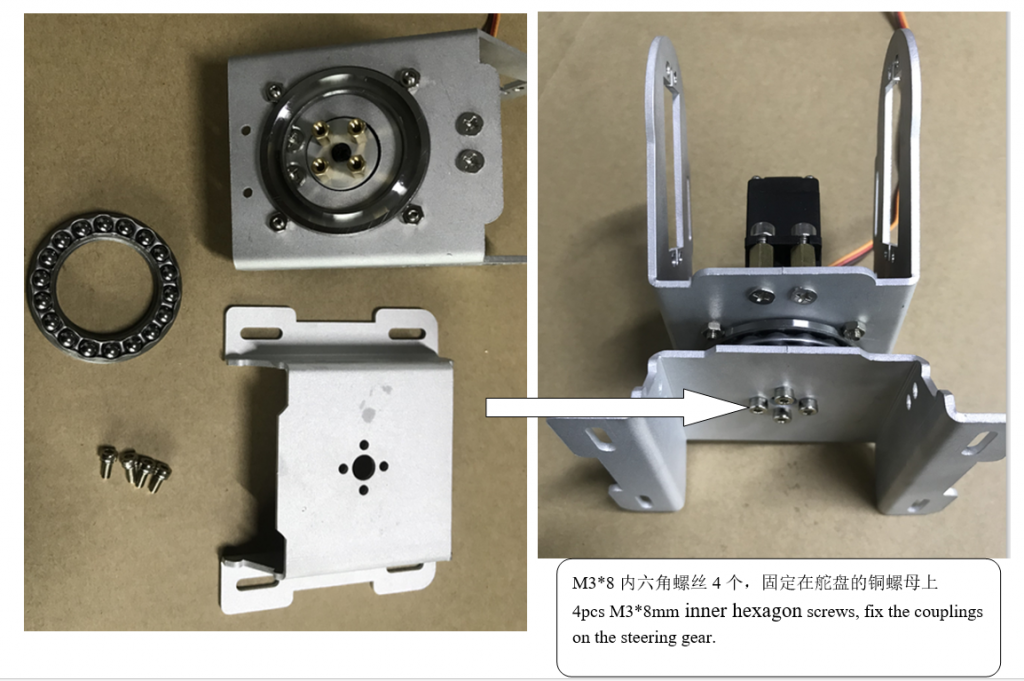
ATTENZIONE!:
Poiché la ralla (il cuscinetto orizzontale) è tenuto in compressione dai due elementi che vengono fissati tramite la vite centrale al rotore, se si stinge troppo questa vite, la ralla risulta essere molto compressa e quindi la rotazione della base del braccio sarà molto difficoltosa. Al contrario, se non è stretta per bene le sfere escono dalla propria sede e quindi non consentono il movimento corretto. Per cui occorre trovare il giusto serraggio della vite, io personalmente per migliorare anche il movimento della ralla ho aggiunto in paio di gocce di olio dopo il serraggio. Un’altra cosa che va detta è che con l’uso del braccio, la vite tende a svitarsi, per cui armatevi di santa pazienza ed ogni tanto verificate che sia serrata al punto giusto.
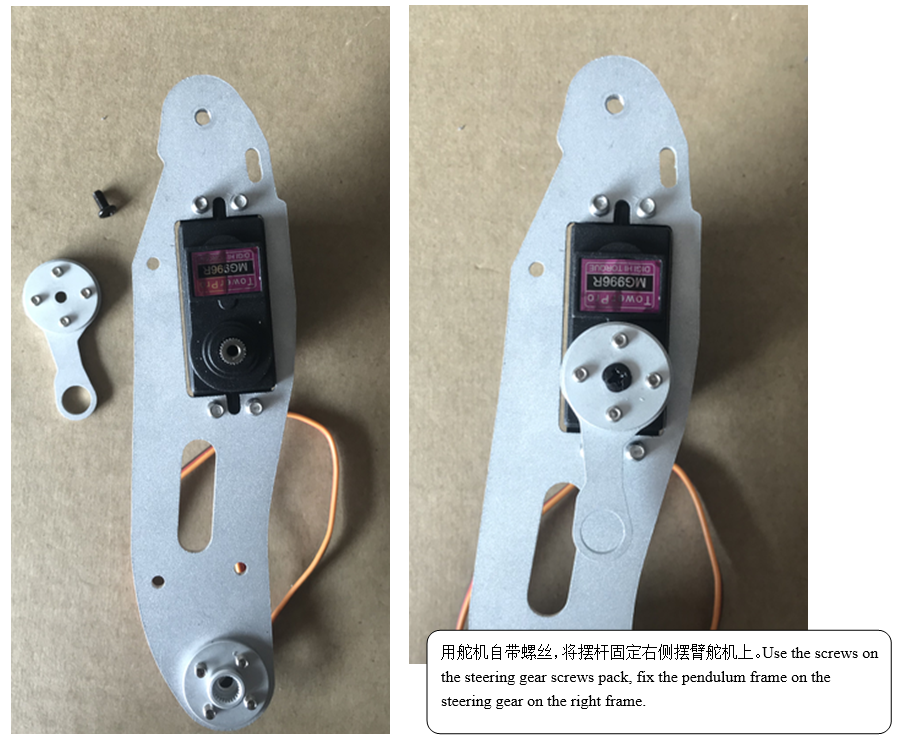
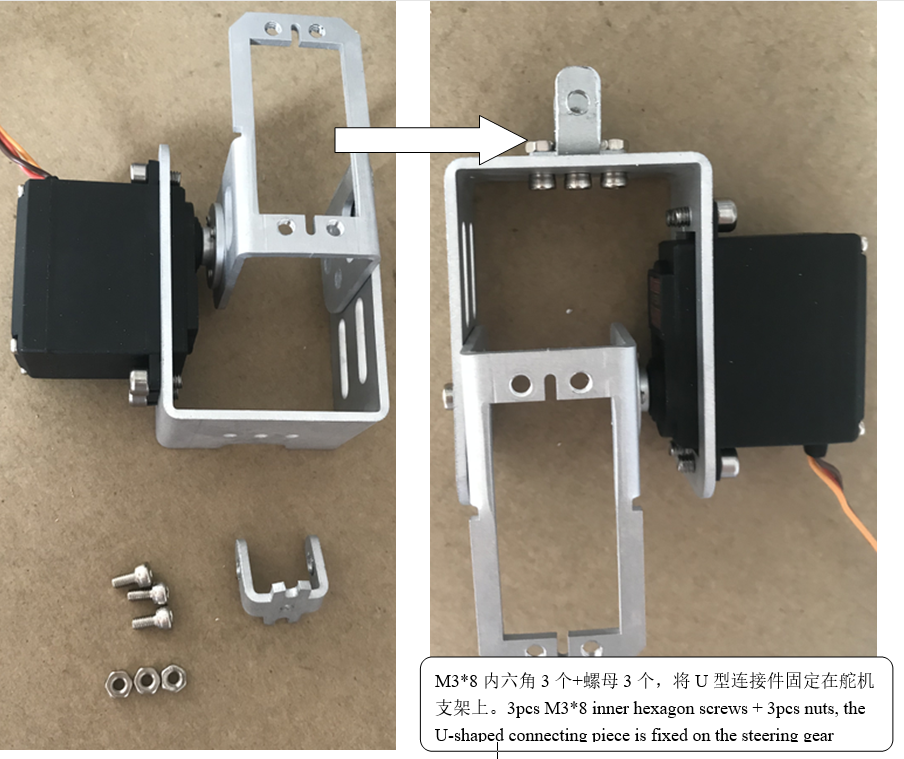
Assemblaggio del Braccio
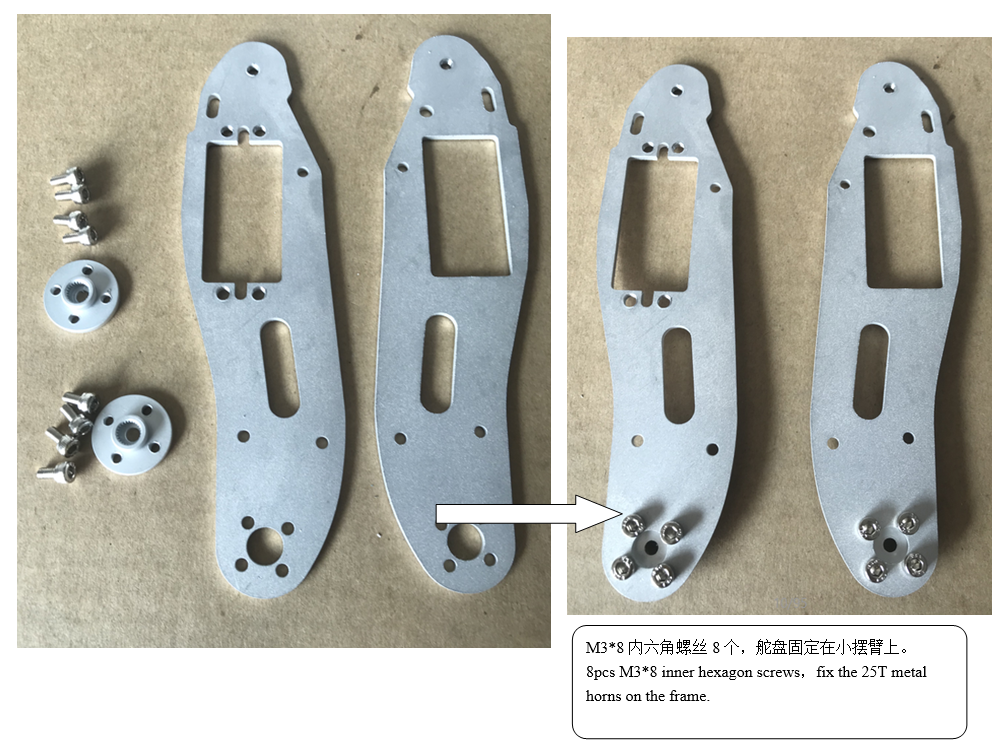

Anche nell’assemblaggio di questo servomotore fate attenzione all’angolo di rotazione a riposo.


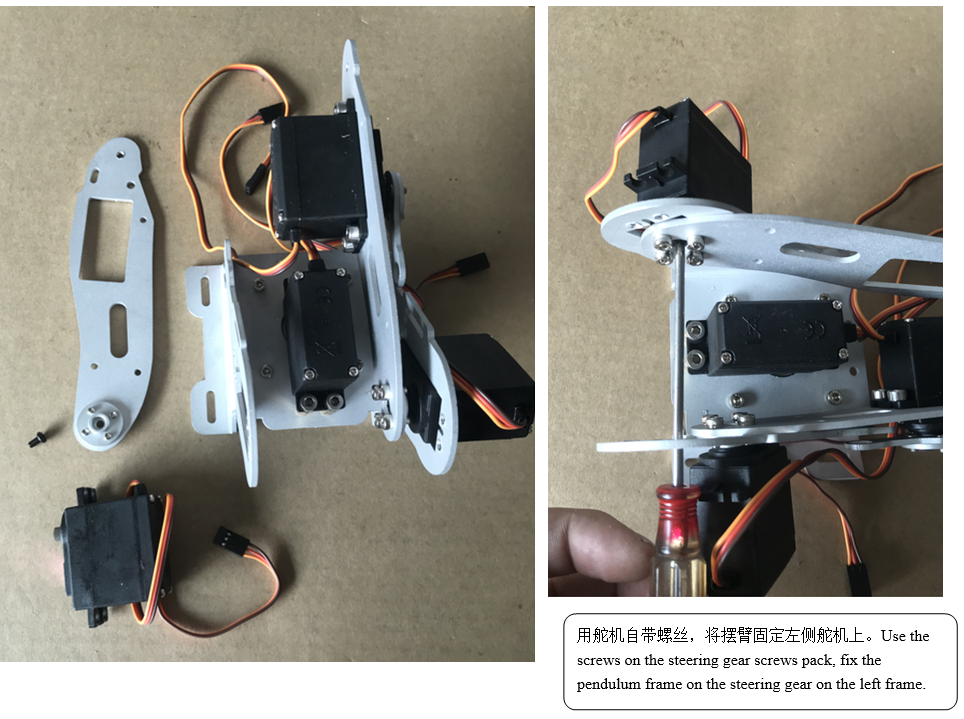
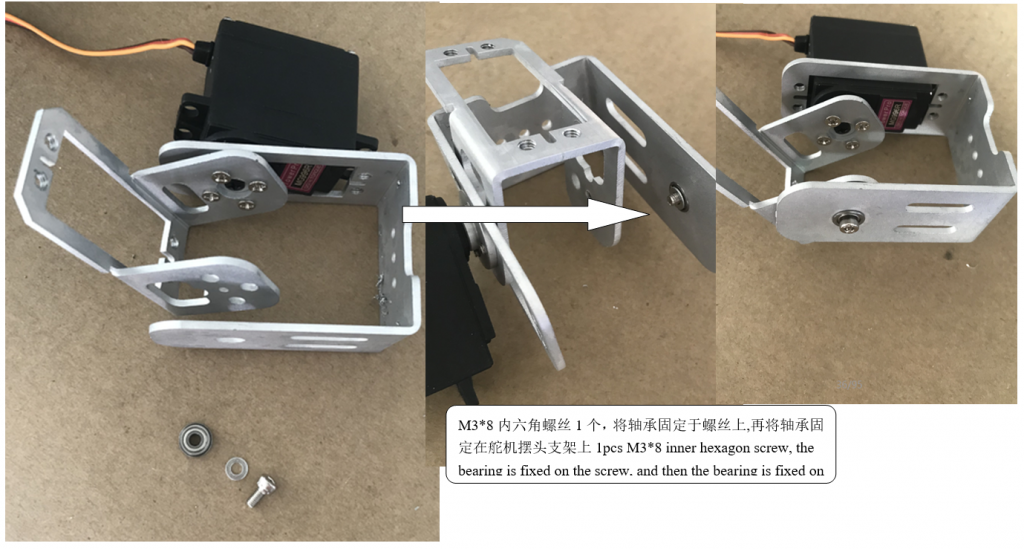
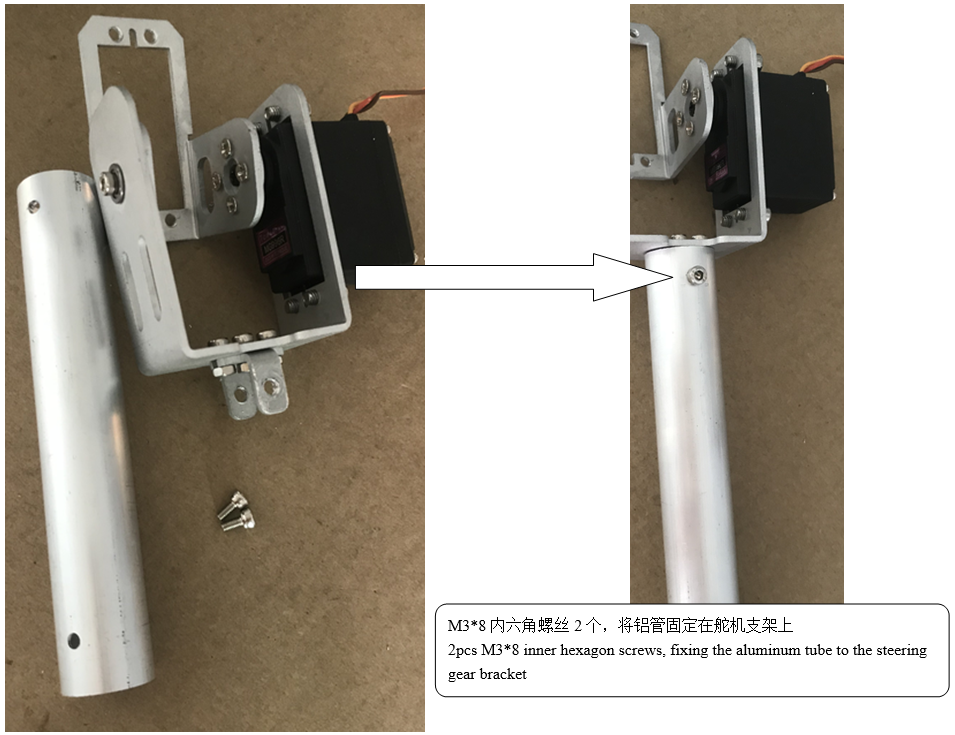
Assemblaggio del Gomito del Braccio Robotico

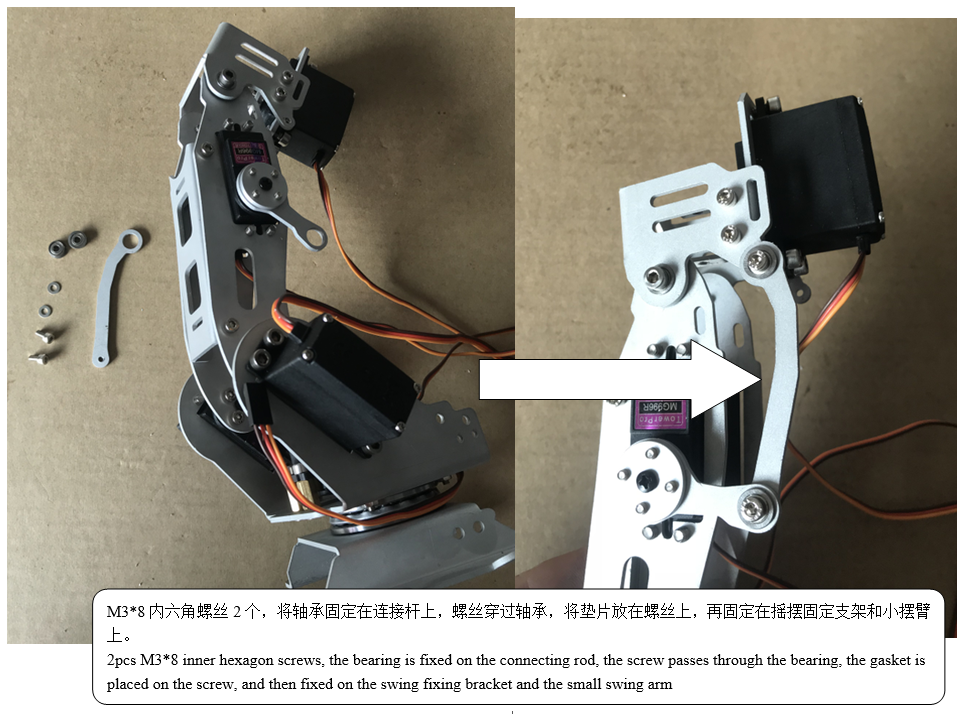
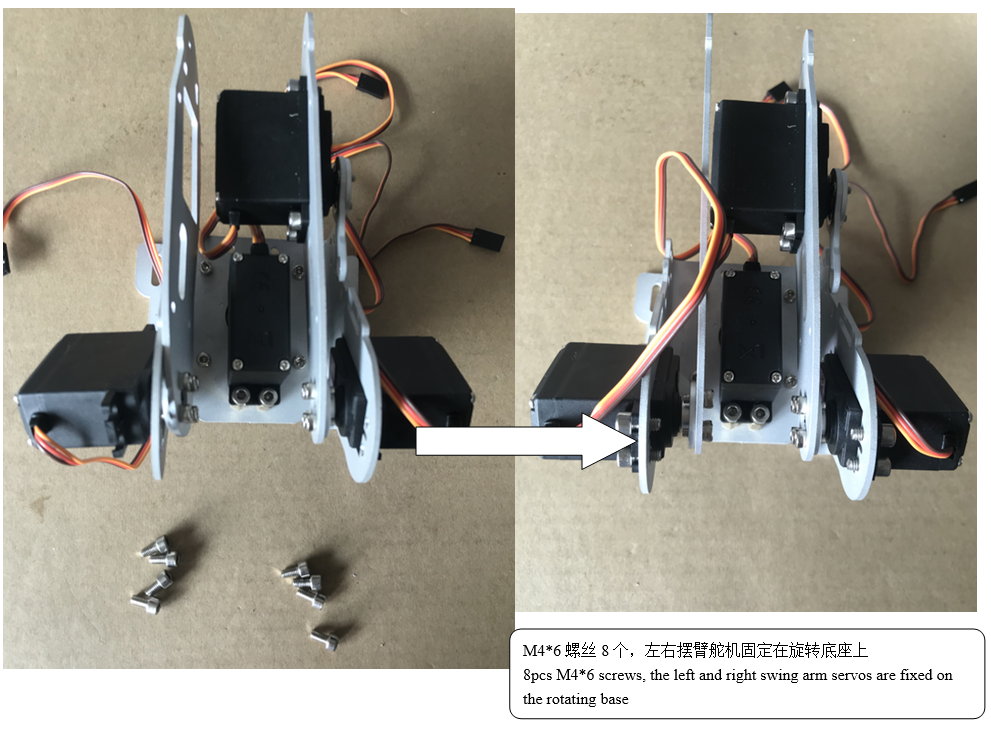
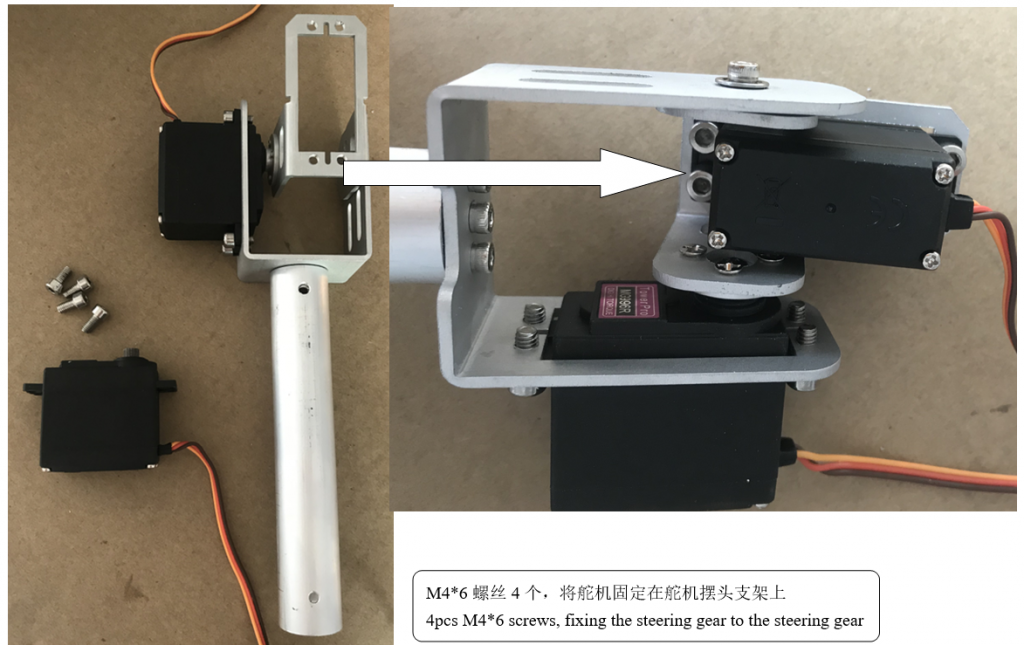
Assemblaggio del Polso del Braccio Robotico

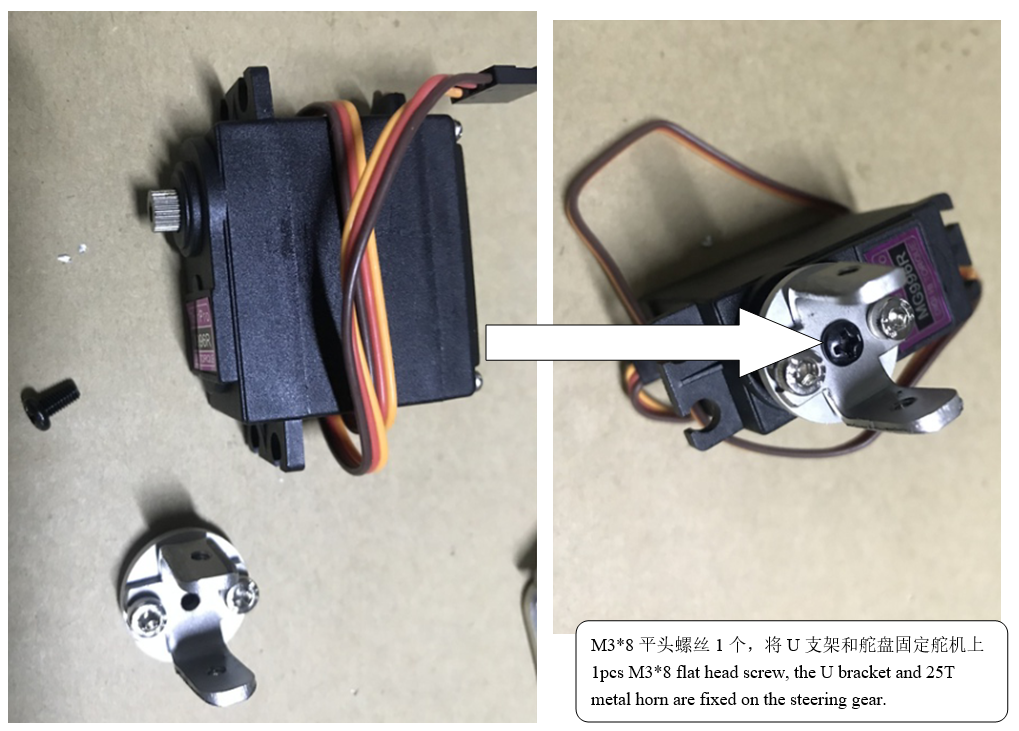
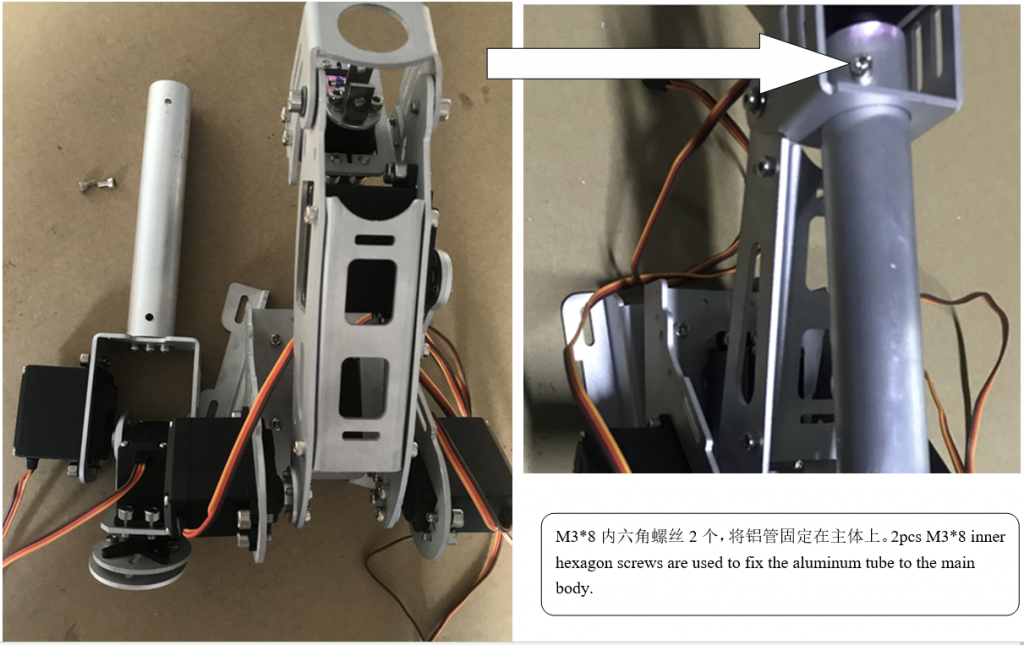
Assemblaggio dell’Avanbraccio del Braccio Robotico
A questo punto restano da montare gli accessori di presa, io ne ho acquistati di due tipologie:
- La pinza ad artiglio
- Le ventose ad aspirazione
Per questi accessori vedremo in seguito come fare per assemblarli e per usarli.
Adesso passiamo alla fase di tests dei servo-motori del braccio robotico assemblato ed iniziamo a vedere di capire come viene definito il “Work Space” di un braccio robot.
Video-assemblaggio commentato del Braccio Robot
In questo paragrafo vi mostro, grazie ad un video suddiviso in tre parti, come assemblare il Braccio Robot, commentando i vari passaggi e soprattutto rilasciando suggerimenti molto utili sia per un corretto assemblaggio che per il futuro controllo del braccio.
Progetto 03 – Definizione Work Space del Braccio Robot con Arduino
Lo scopo di questo progetto è duplice, il primo è quello di verificare il corretto funzionamento dei servomotori assemblati sul braccio robotico, infatti occorre verificare che il nostro braccio robotico si possa muovere agevolmente . Innanzi tutto denominiamo i servo come da figura:
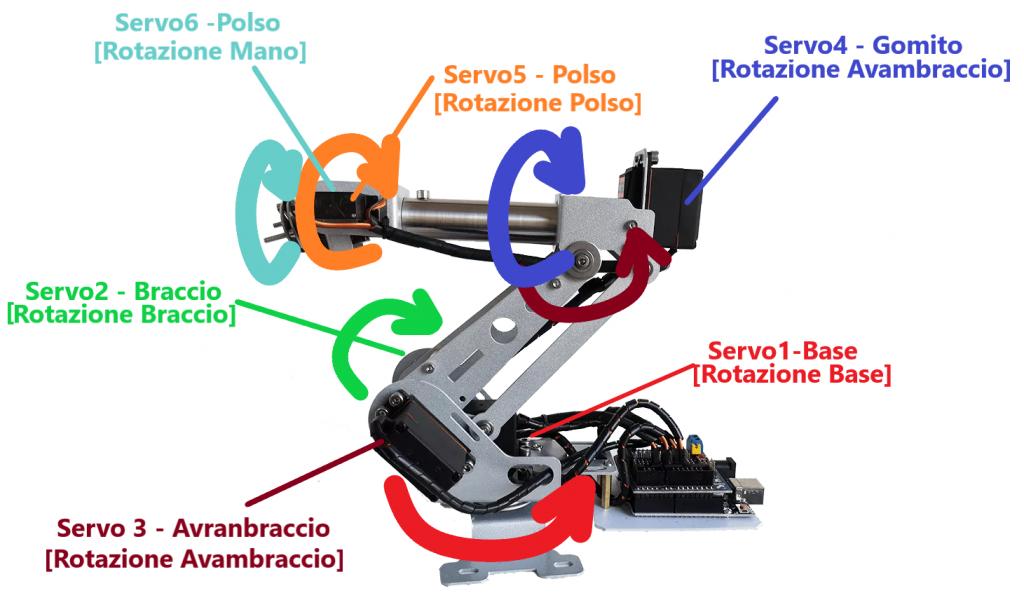
Sempre sulla figura sopra sono rappresentati, in colori diversi, anche i vari movimenti che i singoli servo permettono di fare al Braccio Robotico.
Il secondo scopo del progetto è quello di definire il Minimo Angolo di rotazione ed il Massimo Angolo di rotazione di ogni singolo Servomotore del Braccio Robot, in modo tale che si riesca a comprendere quali movimenti potrà fare il braccio e quindi in quale spazio potrà operare (da cui la definizione di Work Space o Spazio di Lavoro).
Parleremo ancora meglio del Work Space in seguito, per il momento procediamo a realizzare il progetto per determinare le rotazioni massime e minime.
A questo punto passiamo alla realizzazione del progetto, per questo progetto ci occorre:
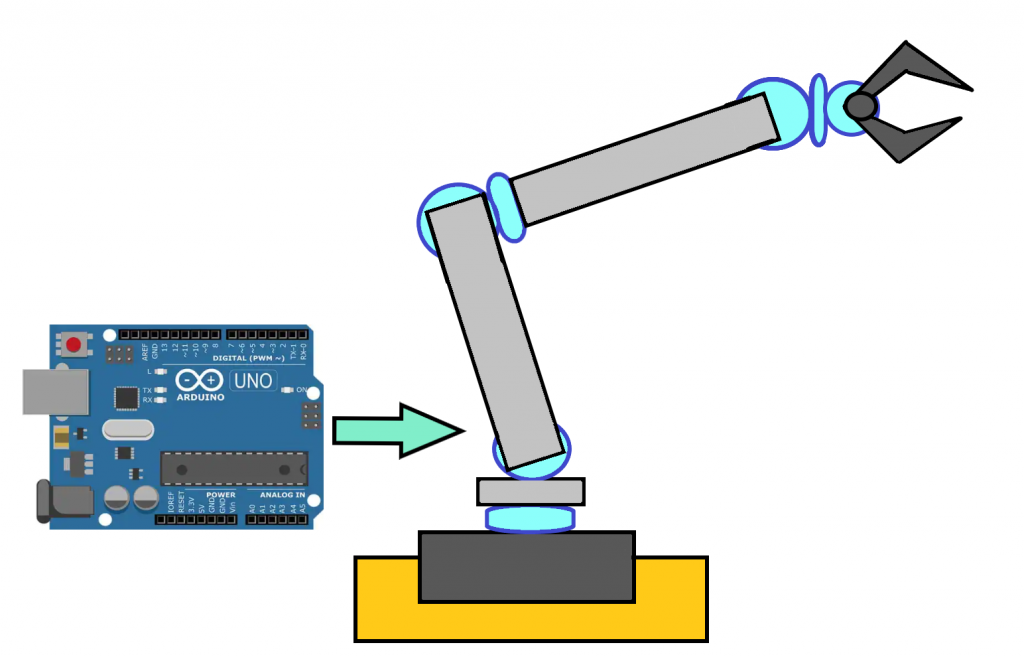
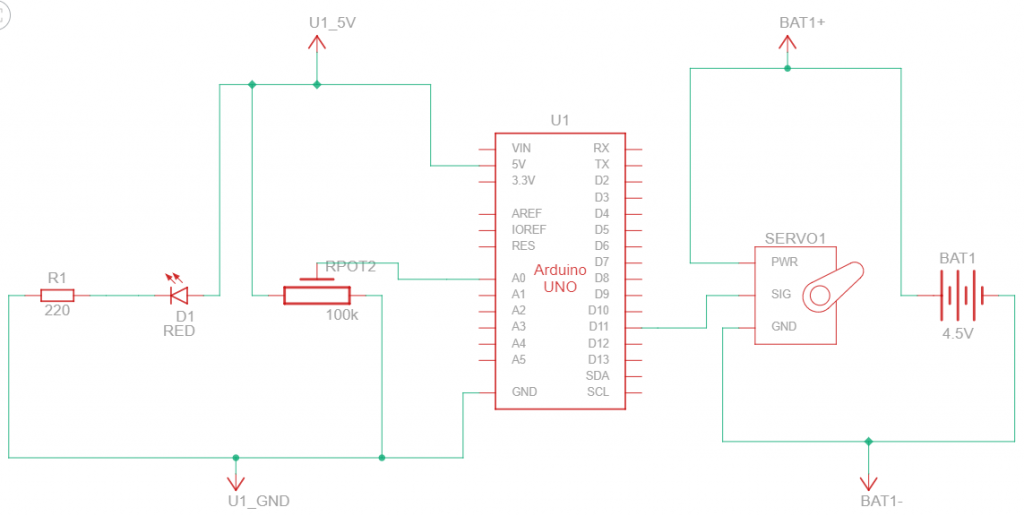
Lo schema elettrico è rappresentato sotto:
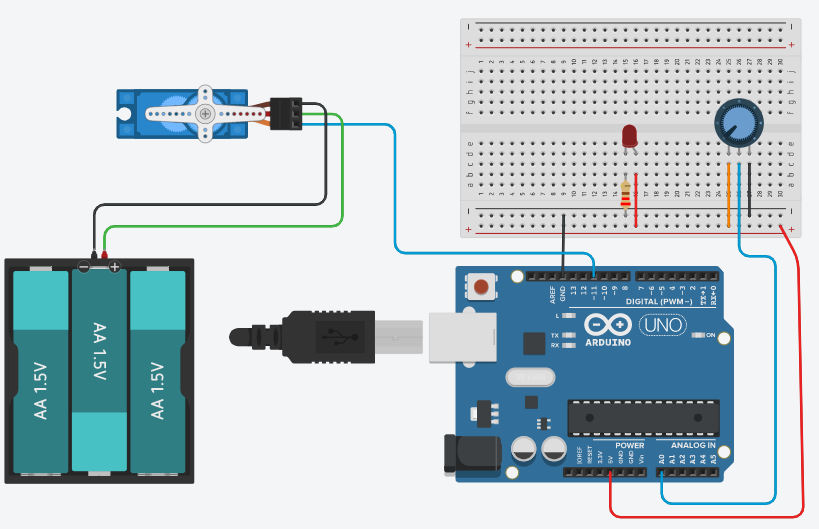
Lo schema di montaggio è invece quello rappresentato di seguito:
Prima di procedere, alcuni suggerimenti:
[Nota 1]
Ovviamente al posto del servomotore SG90, rappresentato in figura, andremo a collegare e testare ognuno dei singoli servomotori del Braccio Robotico. Dopo aver istallato lo sketch su Arduino, aprite il monitor seriale e a schermo troverete tre valori: il valore del potenziometro che indica la rotazione attuale inviata al servomotore, la rotazione massima del servomotore in esame e la rotazione minima. Per fare memorizzare questi ultimi valori, ruotare con il potenziometro il braccio fino al suo massimo angolo raggiungibile e poi al suo minimo.
[Nota 2]
Durante i test tenete ben salda la base del braccio robot altrimenti rischiate che con il movimento cada e poi con la rotazione del braccio si danneggi qualche servo o anche la struttura in alluminio del braccio stesso. Se volete ovviare a questo inconveniente, vi suggerisco di acquistare una buona base in legno massello su cui fissare la base del braccio robot, oppure, come ho fatto io, sono andato presso un artigiano che lavora il ferro e con una spesa di circa 15 euro mi sono fatto realizzare una base in ferro del peso di circa 1 kg su cui imbullonare il braccio robot.
Lo sketch da istallare su Arduino è il seguente:
Il progetto consente oltre che testare i singoli servo del braccio anche quello di vedere quali sono le massime rotazioni ammesse dal braccio, infatti ad esempio dal video del progetto si osserva che il Servo 3, quello che fa ruotare l’avanbraccio, teoricamente avrebbe una escursione da 0 a 180°, ma questo perché il Servo 2 non risulta essere alimentato e quindi con la rotazione dell’avanbraccio c’è anche la rotazione del braccio (quella indotta dal Servo 2), in realtà, e questo lo vedremo anche in seguito, quando il Servo 2 sarà alimentato e quindi terrà bloccata la rotazione del braccio nella sua posizione definita, il Servo 3 avrà una variazione di rotazione che andrà da un minimo di 37° a un massimo di 159°.
Video-Progetto 3 – Definizione Work Space Braccio Robot con Arduino
Se hai trovato la lezione interessante fai una donazione mi aiuterai a realizzarne tante altre.
